





安川协作机器人HC10DT可以和人一起工作的机器人,不需要安全装置,可以手持教机器人做动作
什么是协作机器人?
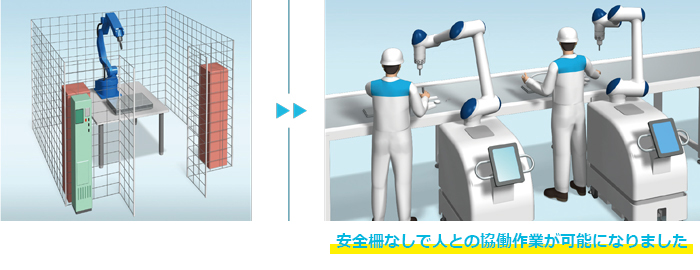
到目前为止,机器人引入的障碍很大
当你听到工业机器人时,许多人会想到汽车工厂的焊接和涂漆场景。然而,*近,机器人已被用于除汽车以外的许多领域,包括物流和食品。近年来,全世界制造场所的人力短缺已经成为严重的问题,并且越来越需要使用机器人的自动化。此外,直到现在,机器人经常不得不重复执行简单的任务,但*近使用的需求已经多样化,例如让一个机器人执行多个任务。
尽管如此,传统的工业机器人必须与人类工作分开安装在安全栅栏中,因此需要大的空间和安装成本。有很高的障碍。
-
当你听到工业机器人时,许多人会想到汽车工厂的焊接和涂漆场景。然而,*近,机器人已被用于除汽车以外的许多领域,包括物流和食品。近年来,全世界制造场所的人力短缺已经成为严重的问题,并且越来越需要使用机器人的自动化。此外,直到现在,机器人经常不得不重复执行简单的任务,但*近使用的需求已经多样化,例如让一个机器人执行多个任务。
尽管如此,传统的工业机器人必须与人类工作分开安装在安全栅栏中,因此需要大的空间和安装成本。有很高的障碍。
可以与人合作的机器人外观
随着2013年* 1职业安全和健康法规的修订,现在可以安装没有安全围栏的机器人。除此之外,机器人技术的进步使得确保人类安全成为可能,例如在主体中安装安全传感器,因此开发了可以在有限空间中与人协作的协作机器人的开发。它有先进性。现在,许多制造商都在销售协作机器人。
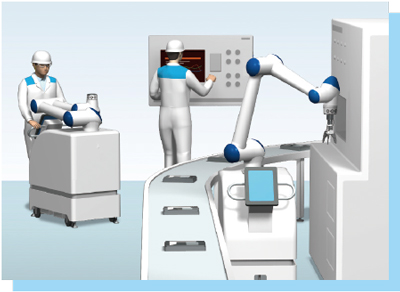
不仅机器人本体,而且用于向机器人传递运动的编程挂件可以像平板终端一样直观地操作,或者可以通过用手直接移动机器人本身来容易地教导它。已经设计出许多产品,即使对于不熟悉机器人操作的人也易于操作。
随着协作机器人的出现,即使在难以引入机器人的情况下,也可以与人协作并执行各种任务。
<实施例>
-
·汽车零件装配,螺钉拧紧,检查
-
·金属加工厂的钣金冲压加工
-
·进出机床的产品
-
- 从机器人到食品工厂等人的产品交付
-
设备之间的传输
-

各种零件对齐,包装盒
-

质量检验,计量
-

装配
* 1:2013年12月24日第1224号通知
(注)安装时不需要安全围栏,需要单独进行风险评估。
随着2013年* 1职业安全和健康法规的修订,现在可以安装没有安全围栏的机器人。除此之外,机器人技术的进步使得确保人类安全成为可能,例如在主体中安装安全传感器,因此开发了可以在有限空间中与人协作的协作机器人的开发。它有先进性。现在,许多制造商都在销售协作机器人。
不仅机器人本体,而且用于向机器人传递运动的编程挂件可以像平板终端一样直观地操作,或者可以通过用手直接移动机器人本身来容易地教导它。已经设计出许多产品,即使对于不熟悉机器人操作的人也易于操作。
随着协作机器人的出现,即使在难以引入机器人的情况下,也可以与人协作并执行各种任务。
<实施例>
- ·汽车零件装配,螺钉拧紧,检查
- ·金属加工厂的钣金冲压加工
- ·进出机床的产品
- - 从机器人到食品工厂等人的产品交付
-
设备之间的传输
-
各种零件对齐,包装盒
-
质量检验,计量 -
装配
* 1:2013年12月24日第1224号通知
(注)安装时不需要安全围栏,需要单独进行风险评估。
安川电机协同机器人

MOTOMAN-HC10DT
Yasukawa的协作机器人MOTOMAN-HC系列可以在与人相同的空间内进行协作,具有防止手指和手被抓住的结构,以及可*大限度地降低人体接触危险的安全功能它有。即使是那些不熟悉机器人操作的人也可以使用直接教学按钮轻松操作。
此外,还可以提供手推式和可以推动和搬运的推车,以便在生产计划改变或线路布局变化时可以轻松安装在所需位置。
MOTOMAN-HC10DT
Yasukawa的协作机器人MOTOMAN-HC系列可以在与人相同的空间内进行协作,具有防止手指和手被抓住的结构,以及可*大限度地降低人体接触危险的安全功能它有。即使是那些不熟悉机器人操作的人也可以使用直接教学按钮轻松操作。
此外,还可以提供手推式和可以推动和搬运的推车,以便在生产计划改变或线路布局变化时可以轻松安装在所需位置。
MOTOMAN-HC系列通过人与机器人之间的协作扩展了新制造的可能性。
| 型号 |

|

|
|
|---|---|---|---|
| MOTOMAN-HC10DT | MOTOMAN-HC10DT(防尘/防滴规范) | ||
| 格式 | YR-1-06VXHC10-A10 | YR-1-06VXHC10-B10 | |
| 直接教按钮 | 那里 | 那里 | |
| 结构 | 垂直铰接式(6自由度) | 垂直铰接式(6自由度) | |
| 负载能力 | 10公斤 | 10公斤 | |
| 重复定位精度* 1 | ±0.1毫米 | ±0.1毫米 | |
| 操作范围 | S轴(旋转) | -180°至+ 180° | -180°至+ 180° |
| L轴(下臂) | -180°至+ 180° | -180°至+ 180° | |
| U轴(上臂)* 2 | -5°至+ 355° | -95°至+ 265° | |
| R轴(手腕旋转) | -180°至+ 180° | -180°至+ 180° | |
| B轴(手腕摆动) | -180°至+ 180° | -180°至+ 180° | |
| T轴(手腕旋转) | -180°至+ 180° | -180°至+ 180° | |
| *高速度 | S轴(旋转) | 2.27 rad / s,130°/ s | 2.27 rad / s,130°/ s |
| L轴(下臂) | 2.27 rad / s,130°/ s | 2.27 rad / s,130°/ s | |
| U轴(上臂) | 3.14 rad / s,180°/ s | 3.14 rad / s,180°/ s | |
| R轴(手腕旋转) | 3.14 rad / s,180°/ s | 3.14 rad / s,180°/ s | |
| B轴(手腕摆动) | 4.36 rad / s,250°/ s | 4.36 rad / s,250°/ s | |
| T轴(手腕旋转) | 4.36 rad / s,250°/ s | 4.36 rad / s,250°/ s | |
| **位置*大速度 | 协作驾驶启用 | 250毫米/秒 | 250毫米/秒 |
| 协作操作无效 | 1000毫米/秒 | 1000毫米/秒 | |
|
允许的 时刻 |
R轴(手腕旋转) | 27.4 Nm | 27.4 Nm |
| B轴(手腕摆动) | 27.4 Nm | 27.4 Nm | |
| T轴(手腕旋转) | 9.8 Nm | 9.8 Nm | |
|
容许 的惯性力矩 (GD 2 /4) |
R轴(手腕旋转) | 公斤·男0.78 2 | 公斤·男0.78 2 |
| B轴(手腕摆动) | 公斤·男0.78 2 | 公斤·男0.78 2 | |
| T轴(手腕旋转) | 0.10 kgm 2 | 0.10 kgm 2 | |
| 体重 | 48公斤 | 58公斤 | |
| 保护结构 | IP20 | IP67 | |
| 安装环境 | 温度 | 0°C至+ 40°C | 0°C至+ 40°C |
| 湿度 | 相对湿度为20%至80%(无冷凝) | 相对湿度为20%至80%(无冷凝) | |
| 振动加速 | 4.9 m / s 2(0.5 G)或更低 | 4.9 m / s 2(0.5 G)或更低 | |
| 海拔 | 1000米或更少 | 1000米或更少 | |
| 否则 |
|
|
|
| 供电能力* 3 | 1.0千伏安 | 1.0千伏安 | |
| 安装方法* 4 | 落地式,安装在天花板上,壁挂式,倾斜式 | 落地式,安装在天花板上,壁挂式,倾斜式 | |







